针对深管、长管内径测量,在保持高精度的内径测量的同时,还需要准确控制传感器在管道内的行进位移。
ZID200系列管道内径测量机器人:该系统是专门为非接触扫描和管道几何参数测量而设计的,可检测管道多种参数,自走式管道行进装置可至管道任意位置,测量数据可通过无线传输至电脑。
ZID200系列管道内径测量机器人可使用多种方式(旋转激光传感器、2D扫描仪、相机)测量一系列管道参数(内径、椭圆度、不圆度、非直线度、螺纹、膛线/轮廓宽度/高度和膛线角度) 并结合这些数据来计算管道的完整 360 ̊ 横截面轮廓。
(1)集成的高清摄像头检测孔的视觉缺陷。专为管道内部的高分辨率视频检测而设计。通过具有可调焦距和照明的高分辨率相机提供全方位可见度(全景照片)。
(2)激光测距仪测量从探头到管端的距离,将测量结果绑定到探头位置。 使用伸缩杆、鹅颈管或作为可选附件,通过仪器马达手动沿着管道移动探头。
(3)测量结果和视频实时显示在 PC 上。 数据可以保存在一个文件中。 测量数据可以根据用户要求显示、协议和存档。
画册下载
ZID200系列管道内径测量机器人主要特点:
(1)针对长管道内径检测设计,测量内径从 55mm 到 300mm 的管道。管道长度测量范围可达100m;
(2)可远程无线遥控;
(3)可测量光滑和异型管的各种参数:内径、椭圆度、不圆度、非直线度(翘曲)、轮廓高度/宽度等;
(4)检测表面磨损、裂痕,并形成三维轮廓图;
(5)可选安装 CCD 相机,实时观察管内部场景;
(6)可根据实际要求进行定制功能。
ZID200系列管道内径测量机器人操作方式:(如需查看相关视频可点击 成功案例 )
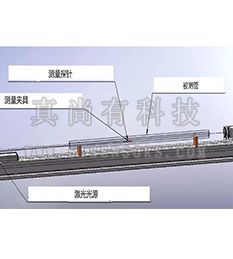
(1)准备测量:将激光源放置在管道的末端,激光束调整的目标放置在管道的另一端。(注意:用户应使用特殊的调整螺钉将激光束对准目标的中心,然后移除目标。)
(2)将探头插入管道中。
(3)按下“开始”按钮后,所有其余过程都会自动处理。
其中:
(1)测量状态显示在笔记本电脑屏幕上,最终报告可以打印或存储在数据库或存储卡上。
(2)探头可以在管道的整个表面上进行测量,自动沿管道移动,且探头运动控制和数据传输是无线的。
(3)位于探头前端的模块可更换,提供视频检测(Video Channel)或非直线度测量(Non-Straightness (warpage) Channel)。
(4)视频通道装有一个带鱼眼镜头的 5 Mpix 摄像头和 3 通道 LED 照明系统,专为管道内部的高分辨率视频检查而设计。
(5)激光测距仪测量从探头到管道末端的距离,将测量结果绑定到探头位置。
ZID200系列管道内径测量机器人产品细节图:




ZID200系列管道内径测量机器人应用领域:
可用于生产过程中的管道质量和几何尺寸检查以及部件和组件的定期检查,特别适用于长管道。
(1)光滑管、异型管和螺纹管
(2)长管
(3)挤出机
(4)精密气缸

ZID200系列管道内径测量机器人技术规格:

ZID200系列管道内径测量机器人测量原理:
为了在整个测量范围内获得所需的精度,系统在一个测量头内包含1个激光传感器。 测量头安装在旋转模块上。 该系统还包含校准环,可沿测量头进行线性平移。
在初始状态,校准环位于激光传感器测量线的水平面。 来自传感器的半导体激光器的辐射聚焦在环形表面上。 表面反射的辐射由传感器的输入透镜收集。
测量头旋转,激光传感器扫描环的内表面。 系统将表面的极坐标(传感器测量到的旋转轴的距离和相应的旋转角度)传输到 PC,用于计算系统校准所需的几何参数。
真尚有_ZID200 管道内径测量系统 | 管道内径测量机器人 | 系统演示
真尚有_ZID200 管道内径测量系统 | 管道内径测量机器人 | 内部行走演示
真尚有_ZID200 管道内径测量系统 | 管道内径测量机器人 | 系统演示
真尚有_ZID200 管道内径测量系统 | 管道内径测量机器人 | 内部行走演示
ZID200系列管道内径测量机器人安装尺寸(仅其中一个系统的安装数据):


英国真尚有_内径测量仪|内孔检测|ZID100
ZID内径测量仪是属于客户定制型的产品,可根据客户实际项目需求定制相应产品。该系统是专门为非接触式测量管道内径而设计的,能精准、快速、无损伤检测管道内部几何数据。
ZID内径测量仪可用于非接触式测量长管、圆柱管、锥形管、涡轮钻等的内径和内轮廓。ZSY提供基于2种工作原理的系统:通过集成多个激光位移传感器测量内径或通过旋转激光传感器进行内表面激光扫描。内径测量仪可实现检测管道的内径、圆度、圆柱度、平行度、锥度、直线度、锥角、同心度、表面缺陷三维轮廓等的参数。
ZID内径测量仪可提供设备:由静止或者可旋转的探头、可在管道内进行移动测量的平移机构(自驱动和牵引两种可选)、测量软件和校准环组成。其他可选项包括保持测量模块对齐管道轴线的固定支架、管道直线度测量模块、视频检视模块、Wi-Fi模块。
画册下载

英国真尚有_内径测量传感器|激光测径仪|ZLDS104
ZLDS104小孔内径传感器是一款专门为小孔内径在线测量而设计的激光测径传感器,是目前市场上最小的激光测径仪。两种不同系列的探针式传感器,能应用在更多测量环境,最小探头直径仅为9mm,标准型号测量范围为9.2-48mm,精度可达到±2um,采样频率高达9.4khz,可以用蓝色激光控制反射和半反射物体,有内置滑环的探头。
画册下载

英国真尚有-高精度内外径测量系统|高精度内径测量系统|高精度内径扫描系统|AAHI20
AAHI20高精度内外径测量系统是一种模块化的非接触式光学内径测量系统,可对管,缸或孔的内部和外部进行微米级精度的3D测量。超小0.55mm直径探头可伸入到管中,扫描获取其完整的内部几何形状
AAHI20高精度内外径测量系统的工作方式是光学探针在运动控制平台伸到旋转管内部,以旋转的方式扫描该截面完整的内部几何形状。使用相同的探头可用于测量一定范围的管道外直径。可以用同一探头移动到外部测量位置以扫描管的外部。
AAHI20高精度内外径测量系统可根据要求定制非标准直径(例如 ø8.8 毫米或 ø30.5 毫米)、长度、光斑尺寸和光束角度(即不同于标准 90°)的定制探头。 还可根据要求构建用于极端温度、高压或其他恶劣环境的定制探头。
1)、可以实现管内外表面的各种微米精度 3D 测量;
• 内外表面的 3D几何 (GD&T);
• 颤振测量;
• 粗糙度测量;
• 缺陷检测 - 孔隙、裂纹、划痕;
• 半透明材料涂层的厚度测量;
2)、完全可配置的自动化检测;
3)、轻松集成到全自动检测设置中。
内径测量仪精密轮廓检测系统微观型面测量系统静态形变测量系统精密在线测厚系统振动测量系统无人警卫船光伏清洁机器人智能垃圾压实机智能机器人自稳定无人机起落平台空气质量检测仪桥梁结构健康检测系统其他检测系统
焊缝分析软件3D数据处理软件工业物联网平台电涡流软件预测分析软件AI软件计算机视觉平台数据平台解决方案服务免代码软件集成平台定制软件
测速测长_测距传感器 | 测距仪皮米级电容位移传感器线激光轮廓扫描仪 | 线扫激光传感器激光位移传感器线性位置传感器光谱共焦传感器Kaman传感器系统干涉仪测径仪 | 测微计 | 激光幕帘千分尺传感器纳米平台光栅传感器地下探测仪光纤传感器太赫兹传感器液位测量传感器倾角 | 加速度测量传感器3D扫描传感器视觉相机 | 3D相机水下测量仪磁耦合线性执行器磁场传感器雷达传感器石墨烯霍尔效应传感器卷材位置传感器振动测量传感器结构检测传感器监控电涡流传感器水听器校准器无线光学通讯传感器网关纳米级电涡流传感器其它检测设备
18145802139(微信同号)
0755-26528100
0755-26528011